Boat Initial Stability at Small Heel Angles
Initial stability describes a boat’s ability to resist small angles of heel about its upright equilibrium position. It refers to the vessel’s behavior at small heel angles, typically up to about 5–10 degrees, where changes in the geometry of the submerged volume are small and linear approximations are valid.
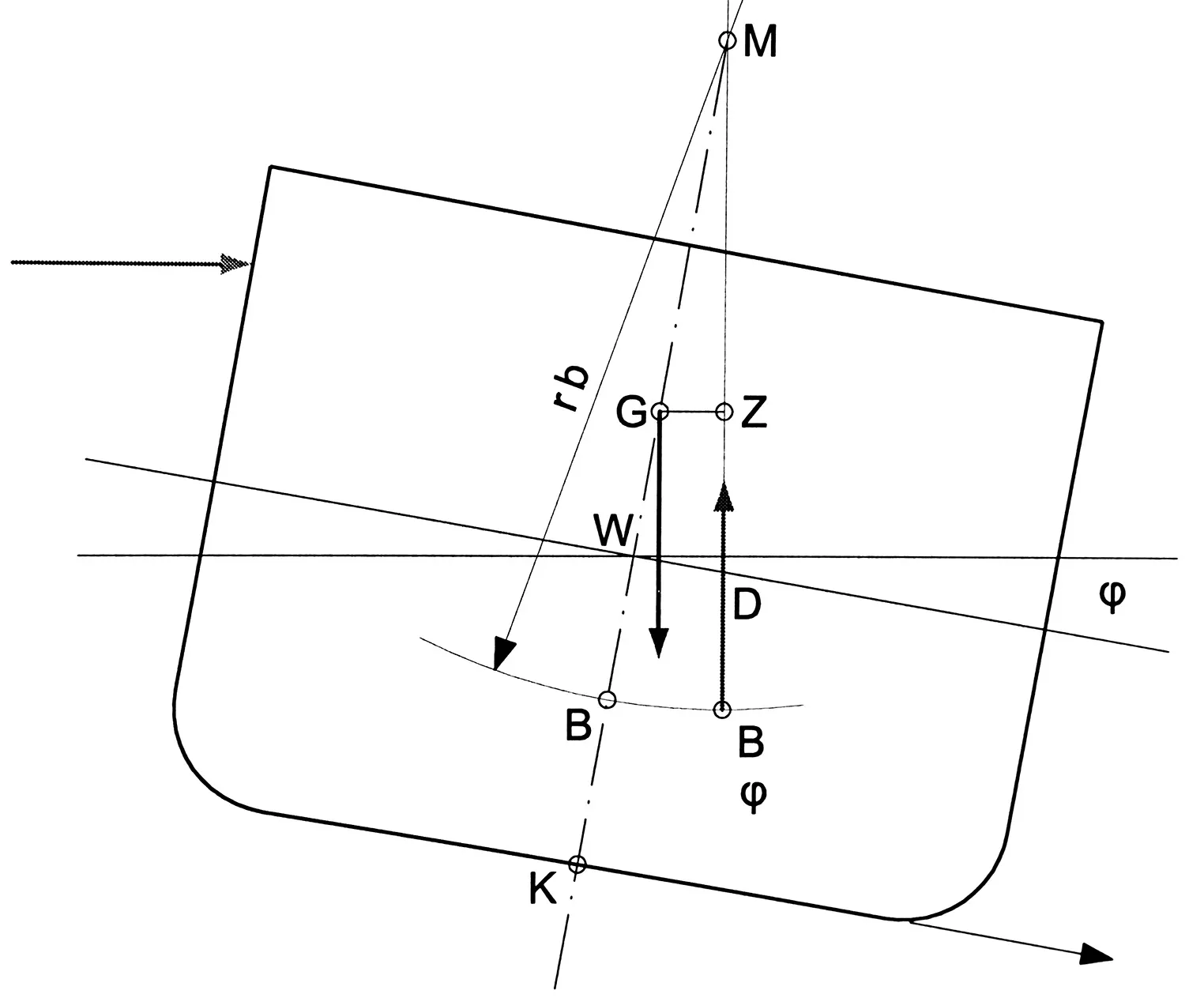
When the boat heels slightly, the center of buoyancy B shifts laterally relative to the center of gravity G, creating a righting arm GZ. For small angles of heel, this righting arm is approximately proportional to the heel angle and is governed primarily by the metacentric height (GM). A larger GM results in a larger righting moment for a given small heel angle, corresponding to a “stiffer” initial stability.
Initial stability is an important indicator of how stable a boat feels in normal operating conditions, such as crew movement, small waves, or light wind. However, it does not describe the vessel’s behavior at large angles of heel and is not sufficient on its own to assess overall safety. For that purpose, the full righting-arm (GZ) curve and dynamic stability characteristics must be considered.
Meaning of Distances and Stability Measures
GM — Metacentric Height
The distance GM is the vertical separation between the center of gravity G and the metacenter M.
It is the primary quantitative measure of initial stability.
- If GM > 0 (M above G), the boat is initially stable.
- If GM = 0, the boat is neutrally stable.
- If GM < 0 (M below G), the boat is initially unstable.
A larger GM produces a stronger restoring moment for small angles of heel, resulting in a “stiffer” vessel.
A smaller GM corresponds to a “softer” motion but reduced initial stability.
GZ — Righting Arm
The distance GZ is the horizontal lever arm between the lines of action of buoyancy and weight.
It directly determines the righting moment, calculated as:
Righting Moment = Displacement × GZ
For small angles of heel, GZ is approximately proportional to the heel angle φ and to GM, and may be expressed as:
GZ ≈ GM × sin(φ)
This linear relationship is valid only in the range of small angles, where initial stability theory applies.
KB, KG, KM (implicit distances)
Although not always shown explicitly, the following vertical distances are commonly used:
- KB: distance from keel to center of buoyancy
- KG: distance from keel to center of gravity
- KM: distance from keel to metacenter
They are related by the fundamental relation: GM = KM − KG
Interpretation
The diagram demonstrates how a small heel causes the buoyancy force to shift laterally while the weight force remains fixed,
creating a restoring couple. Initial stability analysis focuses exclusively on this geometric mechanism and is valid only for small angles of heel.
Behavior at larger angles requires consideration of the full righting-arm curve and nonlinear effects.
Examples of boat with good and bad stability
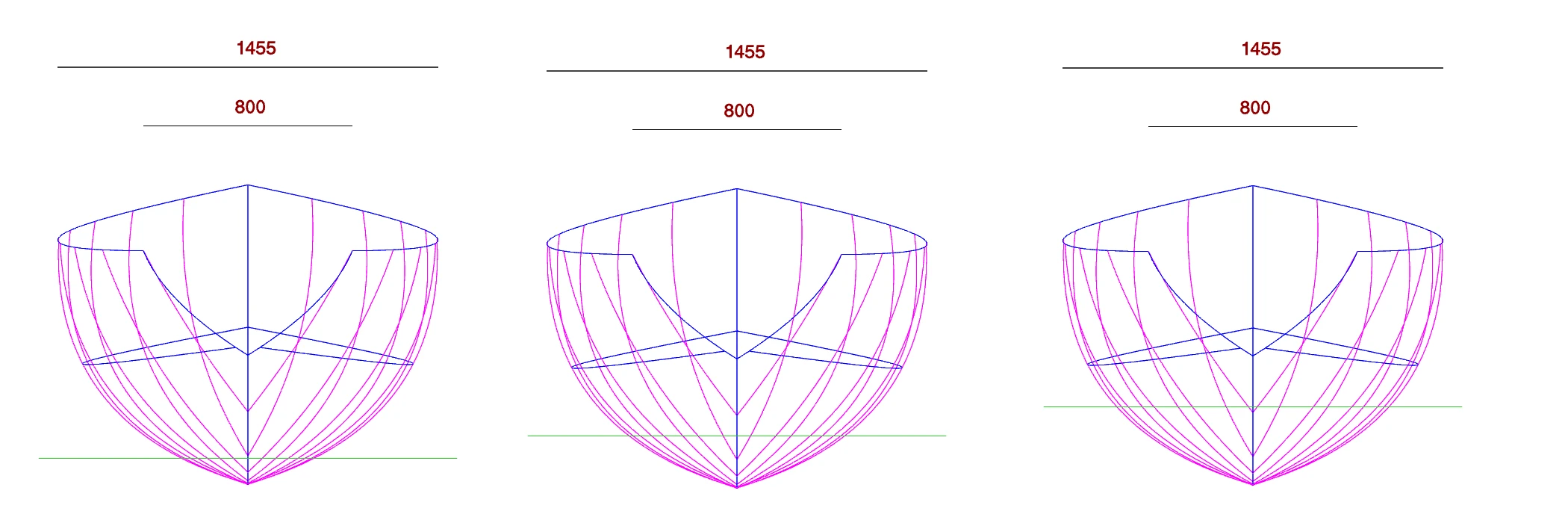
This boat have bad initial stability
| Waterline level (mm) |
Righting Arm GZ (mm) |
Metacentric Height GM (mm) |
Volume under waterline (m 3) |
| 100 |
-3.08 |
-88.17 |
0.069 |
| 200 |
-0.96 |
-27.47 |
0.261 |
| 300 |
-1.10 |
-31.55 |
0.549 |
The green line is the water level. When it is 100 mm it is obvious, the boot will fall on side, also for level 200 mm. Even 300 mm the boat is not stable, Righting Arm GZ is negative.
Conclusion: Boat with shape like this is not stable. Could be stable, but it is needed a lot of ballast or heavy keel.
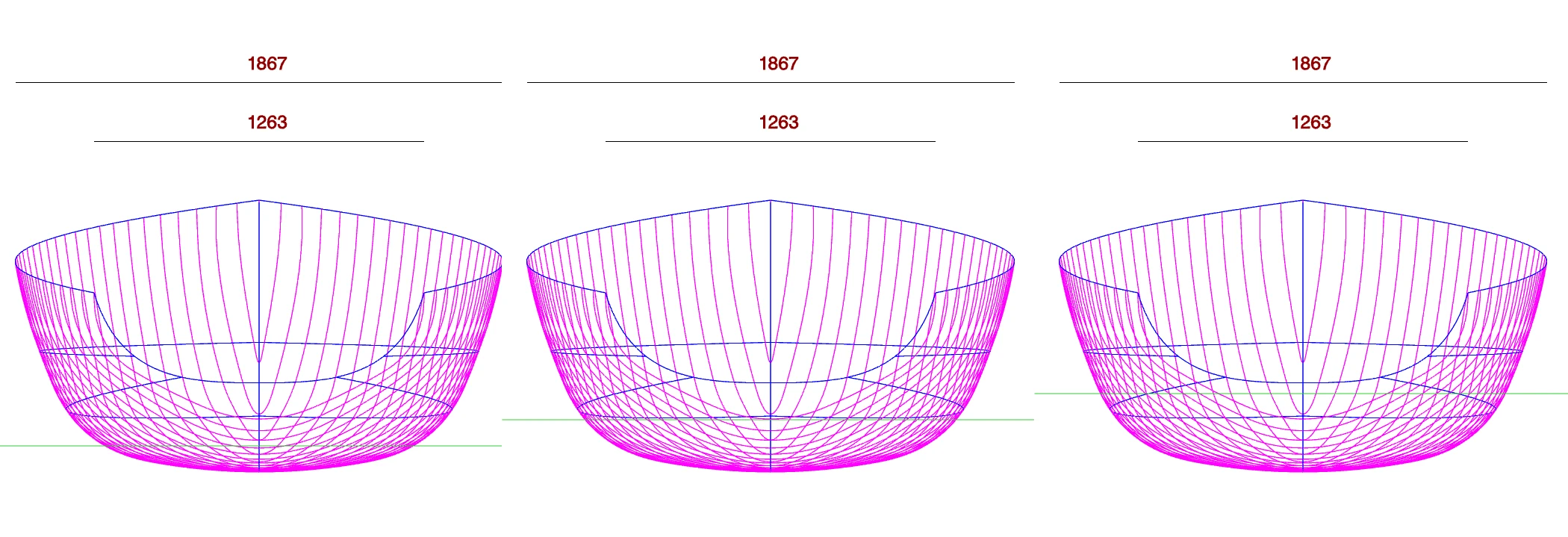
This boat have good initial stability
| Waterline level (mm) |
Righting Arm GZ (mm) |
Metacentric Height GM (mm) |
Volume under waterline (m 3) |
| 100 |
21.76 |
623.48 |
0.219 |
| 200 |
12.24 |
350.75 |
0.636 |
| 300 |
8.72 |
249.87 |
1.155 |
This boat have positive Righting Arm GZ and Metacentric Height GM. With very good values.
Conclusion: Boat with shape like this is very stable.
Calculations are made with BoatCAD.
Reverse engineering of Mediterranean - Black See boat. Initial Stability analyze.
There are a lot of boats in Mediterranean and Black see with similar shape like this. But there isn't 2 equal. These boats are over 40 years old.
I don't know any young craftsman how can build a new one. I guess all they are build without blueprint, this is the reason why they are not equal.
I take the measurement and try to create a blueprint. The blueprint of this boat is available in examples with name PM462.
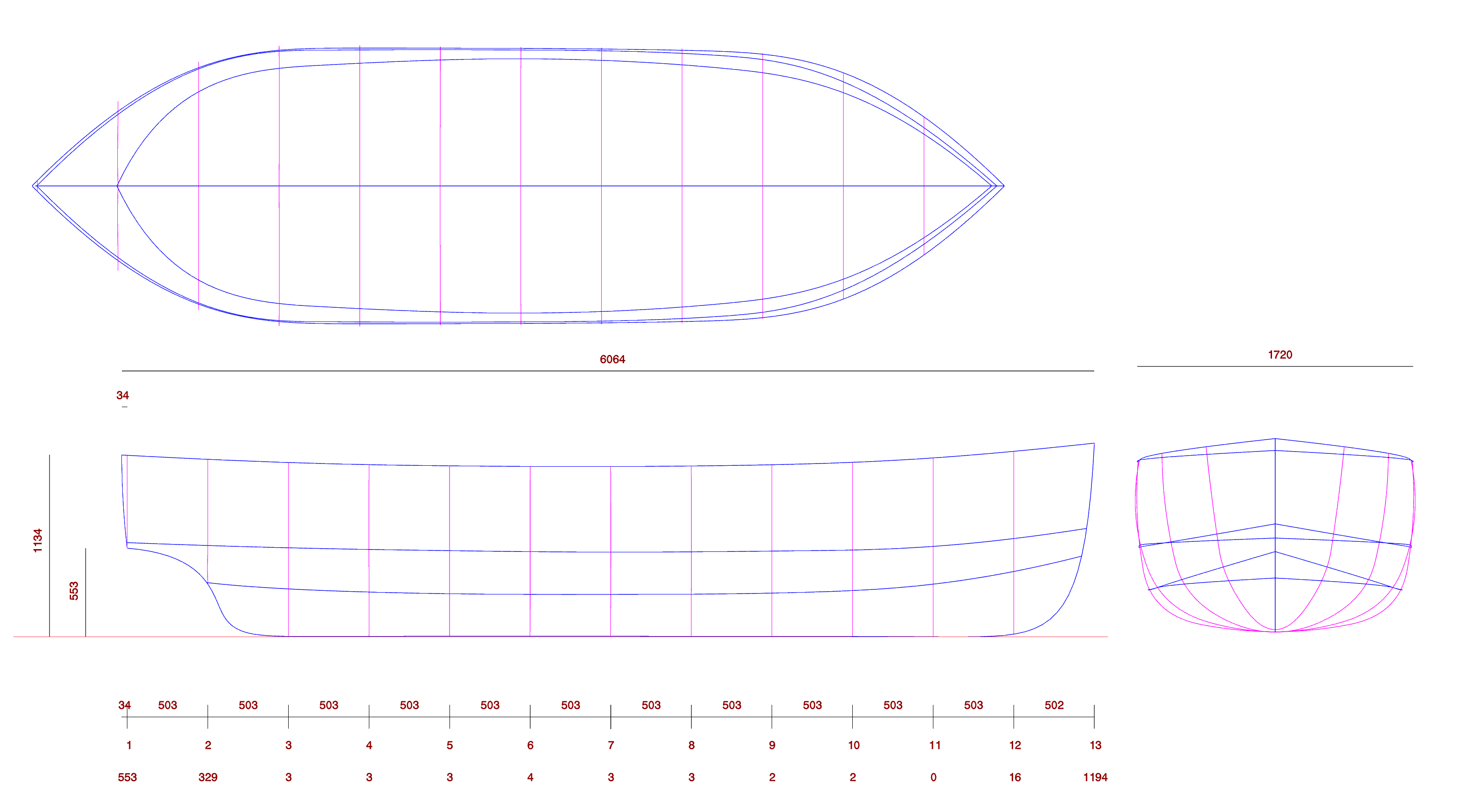
This is the calculations of initial stability of this boat.
| LWL | 5483.03 | mm |
| Volume under waterline | 2.277 | m3 |
| Waterline plain surface | 7.433 | m2 |
| Surface boards under waterline | 9.261 | m2 |
| Surface all | 7.806 | m 2 |
| Initial stability | | |
| Angle 2° | | |
| BM | 354.37 | mm |
| GM | 59.86 | mm |
| GZ | 2.09 | mm |
| Angle 4° | | |
| BM | 357.10 | mm |
| GM | 62.59 | mm |
| GZ | 4.37 | mm |
Conclusion: The boat will not capsize easily, but it will have a slow, “soft” righting response and will heel noticeably when a person or cargo is moved.
The boat is narrow (1.72 m is a small beam for a 6 m hull).
It has a high center of gravity.
Reference values for comparison
For boats of approximately 6 m length:
GM ≈ 50–80 mm → soft, comfortable, but sensitive
GM ≈ 100–200 mm → normal stiffness
GM > 250 mm → very stiff, harsh response in waves
This is at the lower end of the range.
There is also 1 difference. When I measure the boat it was in horizontal position. On reality when the boat is in the water it has some different.
The front side is higher than stern. This will give some difference in the real situation.
The center of the boat is section 7. The engine is usually over section 6 or between 5 and 6.